Cara Mebuat BLDC KONTROLLER
DENGAN
ARDUINO NANO
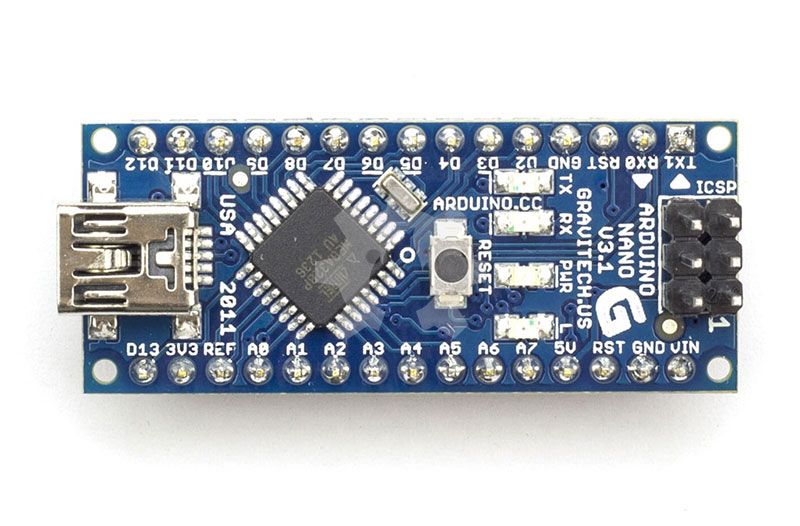
Arduino Nano adalah salah satu papan pengembangan mikrokontroler yang berukuran kecil, lengkap dan mendukung penggunaan breadboard. Arduino Nano diciptakan dengan basis mikrokontroler ATmega328 (untuk Arduino Nano versi 3.x) atau ATmega 168 (untuk Arduino versi 2.x). Arduino Nano kurang lebih memiliki fungsi yang sama dengan Arduino Duemilanove, tetapi dalam paket yang berbeda. Arduino Nano tidak menyertakan colokan DC berjenis Barrel Jack, dan dihubungkan ke komputer menggunakan port USB Mini-B. Arduino Nano dirancang dan diproduksi oleh perusahaan Gravitech.
Cara kerja pada motor BLDC cukup sederhana, yaitu magnet yang berada pada poros motor akan tertarik dan terdorong oleh gaya elektromagnetik yang diatur oleh driver pada motor BLDC. Hal ini membedakakn motor BLDC dengan motor DC yang menggunakan sikat mekanis yang berada pada komutator untuk mengatur waktu dan memberikan medan magnet pada lilitan. Motor BLDC ini juga berbeda dengan motor AC yang pada umumnya menggunakan siklus tenaga sendiri untuk mengatur waktu dan memberi daya pada lilitan. BLDC dapat memberikan rasio daya dan beban yang lebih tinggi secara signifikan dan memberikan efisiensi yang lebih baik dibandingkan motor tanpa sikat tradisional.
Pada prinsip dasar medan magnet adalah kutub yang sama akan saling tolak menolak sedangkan apabila berlainan kutub maka akan tarik menarik. Jadi jika kita mempunyai dua buah magnet dan menandai satu sisi magnet tersebut dengan north (utara) dan yang lainnya south (selatan), maka bagian sisi northakan coba menarik south, sebaliknya jika sisi north magnet pertama akan menolak sisi north yang kedua dan seterusnya apabila kedua sisi magnet mempunyai kutub yang sama .
Prinsip mengenai kutub magnet tersebut dapat diterapkan dalam prinsip kerja motor BLDC. Secara umum motor BLDC memiliki medan magnet permanen pada rotor dan magnet yang berasal dari gaya elektromagnet (magnet yang ditimbulkan dari pemberian input arus listrik) pada bagian kumparan stator.
Pada motor BLDC, kontroler berfungsi untuk mengatur arus masukan yang harus dialirkan ke kumparan stator untuk dapat menimbulkan medan elektromagnet yang sesuai untuk memutar rotor. Hal inilah yang menjadi pembeda dengan motor DC konvensional, dan menggantikan kerja komutasi mekanisnya.
Magnet permanen pada motor BLDC dilengkapi dengan kumparan tiga fase. Kumparan-kumparan tersebut terletak di bagian stator. Magnet bergerak terletak di stator. Fase kumparan diaktifkan dengan penyesuain gerakan rotor. Rotasi berbasis rotasi medan magnet diilustrasikan pada Gambar dibawah, bagian kiri adalah fase pergerakan dan bagian kanan adalah fase eksitasi. Fluks stator dihasilkan pada saat fase eksitasi, dan fluks rotor dihasilkan oleh magnet permanen.

Komutasi Motor BLDC
Sebenarnya bagaimana sih sistem komutasi dasar pengontrollan motor BLDC itu?. Bagaimana sih dari input hall sensor dapat berubah menjadi pola drive MOSFET pada positif channel dan begatif channel?. Mari kita simak ulasannya. Sebelumnya diharapkan sudah tau tentang pola dasar hall sensor dan tentunnya pengetahuan dasar tentang sistem digital. Okey check this.

Kontroller BLDC
1. Pola hall sensor 120 phase.
Disini kita akan fokus pada 120 derajat. Karena dalam 60 derajat tentunya pola hall sensor akan berbeda. Hall sensor berfungsi meneteksi posisi rotor sebuah motor. Dalam derajat phase 120, maka akan terbentuk 6 pola.
Mengapa pola bisa demikian?, itu sudah pasti karena konstruksi motor BLDC sendiri. Bisa dibuktikan pada gambar berikut:

Skema pola hall 120 derajat pada pengujian osiloscop.
Perhatikan Grafik digital pada bagian hall sensor, Berdasar data diatas maka dapat disimpulkan pada digita 0 1 pola hall sensor yang terjadi adalah.


Tabel Pola Hall kabel 3 hall sensor
2. Output yang diharapkan 3 phase motor
Kita masih mengacu pada sumber data gambar diatas. Dari sumber datas tersebut maka dapat diketahui pola kelistrikan pada phase BLDC adalah sebagai berikut:


urutan skema kelistrikan pada 3 phase motor
Sehingga jika ditampilkan dalam tabel adalah:

3. Pola Drive mosfet dari mikrokontroller yang dibutuhkan.
Sekarang kita sudah mengetahui pola hall dan pola kelistrikan pada 3 phase motor. Sekarang tinggal bagaimana menciptakan suatu kondisi mikrokontroller men-drive mosfet pada positif channel dan negatif channel agar tercipta kelistrikan phase yang tepat.

Pada drive sebuah MOSFET yang melibatkan negatif channel dan positif channel, pada umumnya dibeakan data aktivasinya. Untuk positif channel on adalah data 1, dan negatif channel on adalah data 0. Hal ini bertujuan supaya tidak terjadi short mendadak ketika mikro mengeluarkan data 1 semua. Dengan demikian dapat disimpulkan pada tabel.

Pola Drive FET pada mikrokontroller.
4. Kesimpulan keseluruhan
Dari ke-3 data diatas maka bisa kita rangkum dalam sebuah pola.


Dahlangsung ke skemanya saja dari pada mbulet mbulet di teori
Skema keseluruhan pengontrollan motor BLDC dengan arduino Nano

dari Skema tersebut langsung dibuat PCB nya terlebih dahulu
sebagai berikut :

perhatikan jumper kabelnya
dilakukan setelah tiap bagian QC.

lihat yang warna hijau jalurnya
Dari skema diatas yang perlu diketahui adalah pemilihan pinout terhadap Pin PWM untuk mengatur drive mosfet yang ada di skema.

akan saya jelaskan sedikit mengenai warna yang ada di kolom kolom tabel tersebut
Warna Biru adalah Port yang dapat berfungsi mengeluarkan signal PWM
Warna Orange adalah bagian yang mengaktifkan MOSFET (perlu diingat bahwa mosfet ada yang dijaur poisitf dan ada yang dijalur negatif, jadi nilanya tidak mesti 1 terus untuk ON, sehingga ada yang 1 itu ON dan ada Pula Yang 0 itu ON)
Hall Sensor diinputkan Di PIN 2,3,4
Lalu bagaimana dengan programnya?
program menggunakan arduino IDE dimana saat ini porgram baru bejalan disimulasi karena hardware belum jadi, namun nantinya setelah hardware jadi akan diterapkan programnya dengan penyesuaian-penyesuaian. meski demikian program yang sudah masuk meliputi :
1. Pembacaan Analog Input yang nantinya menentukan nilai PWM
2. Pembacaan Posisi Hall Sensor yang nantinya menentukan ON OFF nya Q1 Q2 Q3 Q4 Q5 Q6
3. BRAKE
4. Maju-Mundur
sisanya belum masuk.hehehe keburu mmumet klo program e uda banyak
berikut adalah programnya
dari program tersebut anda dapat mensimulasikan di software proteu s dengan skema sebagai berikut :

Kalau Anda Males yang ngambar ulang Silahkan Download saja
Karna Ngantuk, penulisannya sampai disini Dulu, besok diperbaiki
jika ada pertanyaan bisa menannyakan melalui WA 0856 4349 6555
kalau anda tidak bisa Jangan Minta dibuatkan (harus semangat untuk belajar)
jika anda memiliki pabrik electronika yang mampu memproduksi komponen ini dengan harga <50rb mari kita diskusikan lebih lanjut untuk produksi.
Update progress hardware (2018)
Nah bagi mahasiswa yang masih belajar, jangan asal copy skema secara mentah mentah. Karena apa?
Itu di hardware ada jumper jumper kabel yang tidak saya gambarkan di skema.
Ingin menanyakan lebih lanjut?
Minimal harus sudah bisa menyalakan led diatas sesuai squen komutasi pada tabel diatas.
Kalau blas belum melakukan apa apa, susah saya yang membantu.
Test gunakan jumper untuk pengujian kerja dari IR2301
Mungkin ada yang tanya jumpernya nyambung kemana saja?
Perhatikan foto berikut ini :



Untuk menguji program arduino dapat memerintah IR2301 gunakan program sederhana saja sesuai portnya seperti berikut ini hasilnya
Semoga Bermanfaat
Nb. Tidak menerima pembuatan hardware untuk tugas kuliah, KMHE, shell eco. Karna belajar adalah proses.
dahsyat !!!
BalasHapusMantap juragan
BalasHapusmantul, kapan kapan tanya ya gan
BalasHapusMas kalo mau belajar langsung boleh?
BalasHapusMantaap, Mas bs japri, no sy 085710226699
BalasHapusmas saya mau tanya skema rangkaian per blok. apakah bisa berkomunikasi lewat email?
BalasHapussyehmaulana.m@gmail.com
mas kompopnen" apa saja yang di perlukan
BalasHapus